115年:物治技術(1)
下圖為肘上截肢者使用之自體操控( body-powered control )義肢,下列敘述何者錯誤? 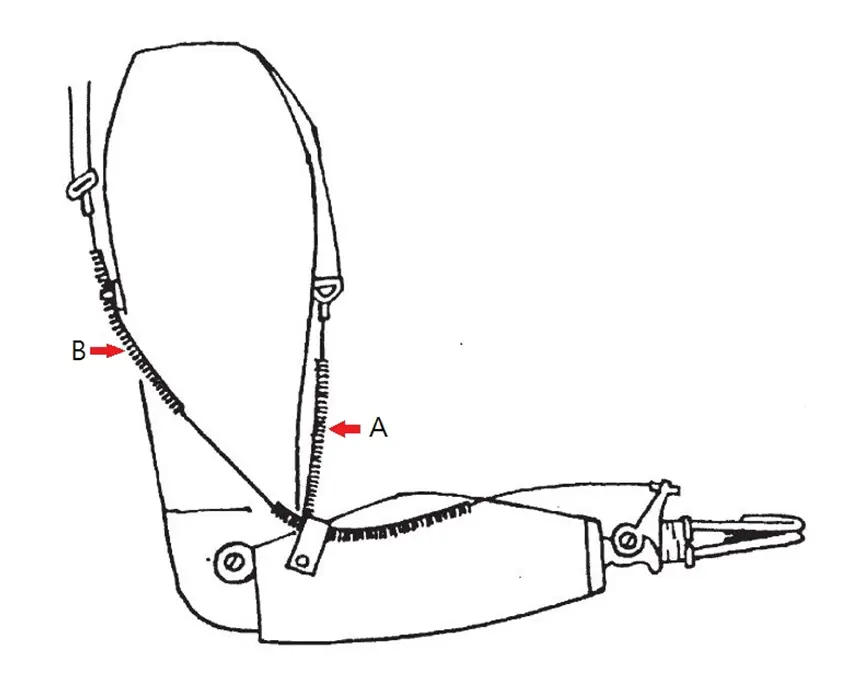
A操控纜索 B可開啟手部裝置
B操控纜索 A可將肘關節上鎖
C操控纜索 A可抬起前臂,彎曲肘關節
D手部裝置為主動張開式功能手鉤( voluntary opening functional hook )
詳細解析
本題觀念:
本題考查的是 肘上截肢(Transhumeral Amputation) 使用的 自身動力義肢(Body-powered Prosthesis) 之操控機制,特別是雙纜線系統(Dual-control cable system)的運作原理。
影像分析:
圖片展示了一個標準的肘上義肢(Above-elbow prosthesis),配備了雙纜線操控系統(Dual-control system)。
- 纜索 A (紅色箭頭 A):位於義肢前側,連接至肘關節的鎖定機關。這條是 肘關節鎖定纜索(Elbow lock control cable)。
- 纜索 B (紅色箭頭 B):位於義肢外側/後側,穿過纜線護套(Housing),連接至前臂的提拉帶(Lift tab)並延伸至末端裝置(手鉤)。這條是 雙重控制纜索(Dual control cable / Fair-lead cable)。
- 手部裝置:末端為一個金屬鉤狀裝置,且看起來有橡皮圈(或類似彈性元件)使其保持閉合,這是典型的 主動張開式手鉤(Voluntary Opening Hook)。
選項分析
-
(A) 操控纜索 B可開啟手部裝置:
- 正確。纜索 B 是雙重控制纜索。當肘關節被 鎖定(Locked) 時,施加在纜索 B 上的拉力會傳遞到末端裝置。對於主動張開式(Voluntary Opening, VO)手鉤,拉動纜索會克服橡皮圈的彈力,使手鉤 張開。
-
(B) 操控纜索 A可將肘關節上鎖:
- 正確。纜索 A 是肘關節鎖定纜索。使用者透過肩膀的特定動作(通常是肩膀下壓、伸展且外展,Depression-Extension-Abduction)拉動此纜索,以循環切換肘關節的狀態(上鎖 解鎖)。
-
(C) 操控纜索 A可抬起前臂,彎曲肘關節:
- 錯誤。纜索 A 的功能 僅限於鎖定或解鎖肘關節。
- 抬起前臂(屈肘) 是 纜索 B 的功能。當肘關節處於 解鎖(Unlocked) 狀態時,拉動纜索 B 會透過槓桿原理將前臂拉起,產生屈肘動作。
-
(D) 手部裝置為主動張開式功能手鉤( voluntary opening functional hook ):
- 正確。圖中的手鉤呈現閉合狀態,這是主動張開式(VO)手鉤的靜止位(Resting state)。這類手鉤靠橡皮圈或彈簧保持閉合(提供夾力),使用者需拉動纜索(Cable B)來將其張開。這是最常見的自身動力末端裝置。
答案解析
本題要求選出錯誤的敘述。 選項 (C) 錯誤地將「屈肘功能」歸因於「鎖定纜索(A)」。實際上,屈肘是由「雙重控制纜索(B)」在肘關節解鎖狀態下執行的。纜索 A 僅負責控制肘關節鎖的開關。
核心知識點
肘上義肢雙纜線系統(Dual-Control Cable System for Transhumeral Prosthesis):
- 前側纜索 (Elbow Lock Cable):
- 功能:控制肘關節鎖定/解鎖。
- 動作:肩部下壓 + 伸展 + 外展 (Depression, Extension, Abduction)。
- 主要控制纜索 (Control Cable / Fair-lead Cable):
- 功能 1 (肘解鎖時):肘關節屈曲 (Elbow Flexion)。
- 功能 2 (肘鎖定時):操作末端裝置 (Operate Terminal Device)。
- 動作:肩部屈曲 (Glenohumeral Flexion) 或 雙肩外展 (Biscapular Abduction)。
參考資料
- AAOS Atlas of Orthoses and Assistive Devices.
- Lusardi, M. M., et al. Orthotics and Prosthetics in Rehabilitation.