111年:物治基礎(2)
用四連桿機構模型(four-bar linkage model)描述膝蓋彎曲的關節運動學,下列何者錯誤?
A此模型可估計出脛骨與股骨間的接觸點位置
B此模型說明了後十字韌帶在彎曲過程中限制了股骨相對脛骨的向前位移
C此模型可顯示前、後十字韌帶在彎曲過程中限制了股骨與脛骨的關節面分離
D此模型可描述並預估脛股關節彎曲過程中的三維運動軌跡
詳細解析
本題觀念:
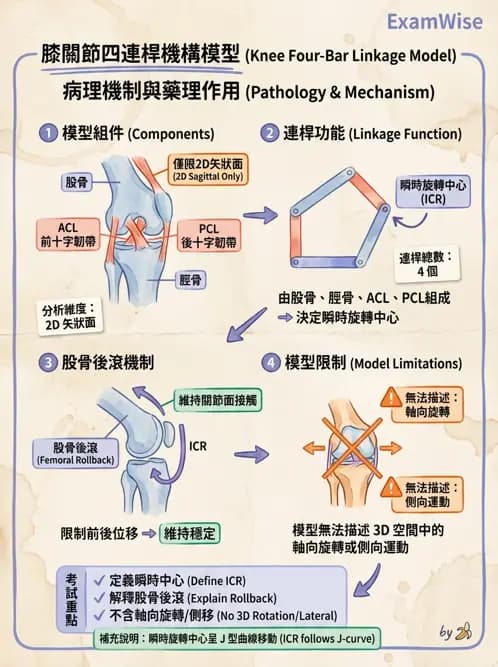
本題主要考查膝關節的四連桿機構模型(Four-bar linkage model)。這是一個在生物力學中常用於描述膝關節在**矢狀面(Sagittal plane)**上運動學特性的簡化模型。
在這個模型中,四個連桿(bars/links)分別代表:
- 股骨(Femur):兩韌帶附著點之間的骨骼部分。
- 脛骨(Tibia):兩韌帶附著點之間的骨骼部分。
- 前十字韌帶(ACL)。
- 後十字韌帶(PCL)。
此模型主要用來解釋膝關節屈伸時的**瞬時旋轉中心(Instantaneous Center of Rotation, ICR)變化,以及股骨在脛骨平台上的滾動(Rolling)與滑動(Gliding/Sliding)**機制(即 posterior rollback)。
選項分析
-
A. 此模型可估計出脛骨與股骨間的接觸點位置
- 正確。四連桿機構模型定義了股骨相對於脛骨的運動路徑。透過此模型計算出瞬時旋轉中心(ICR)的路徑,結合關節面的幾何形狀,可以推估出在不同彎曲角度下,股骨髁與脛骨平台之間的接觸點位置(例如:隨著屈曲增加,接觸點會向後移動)。
-
B. 此模型說明了後十字韌帶在彎曲過程中限制了股骨相對脛骨的向前位移
...(解析預覽)...
升級 VIP 解鎖圖文解析