111年:神經物治(1)
關於非穿戴式機器人輔助行走訓練,下列敘述何者正確?
A僅能提供下肢被動跨步,無法讓病患主動訓練步行
B使用過程病患可獨立運作,通常不需要治療師介入
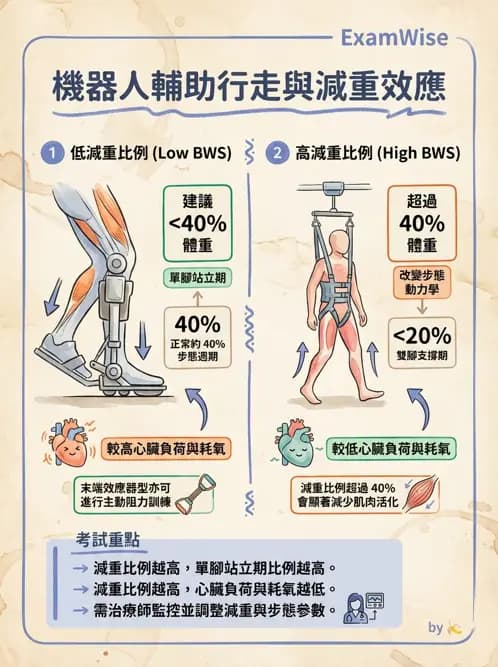
C支撐病患體重的幅度越小,病患心臟負荷會越低
D支撐病患體重的幅度越大,單腳站立期比例越高
詳細解析
本題觀念:
非穿戴式機器人輔助行走訓練(Non-wearable Robot-Assisted Gait Training),通常指的是末端效應器型(End-effector type)機器人(如 G-EO System, Gait Trainer GT I),這類設備將患者的雙腳固定在腳踏板上,模擬行走的軌跡,與外骨骼型(Exoskeleton)(如 Lokomat, HAL,穿戴在腿上帶動關節)有所區別。此題重點在於這類設備的運作特性以及「減重系統(Body Weight Support, BWS)」對步態參數與生理耗能的影響。
選項分析
- A. 僅能提供下肢被動跨步,無法讓病患主動訓練步行:錯誤。
- 早期的機器人可能以被動帶動為主,但現代的非穿戴式(末端效應器型)與穿戴式機器人皆具備「依需求輔助(Assist-as-needed)」或「主動模式」。系統可感測病患的出力狀況,當病患主動力量不足時才給予輔助,甚至提供阻力訓練。因此,病患絕對可以進行主動訓練。
- B. 使用過程病患可獨立運作,通常不需要治療師介入:錯誤。
- 機器人訓練屬於高複雜度的復健介入。治療師必須負責安裝懸吊系統、設定參數(步寬、步長、速度、減重比例)、監控病患生命徵象及調整訓練難度,並防止跌倒或其他意外。
...(解析預覽)...
升級 VIP 解鎖圖文解析