110年:物治技術(2)
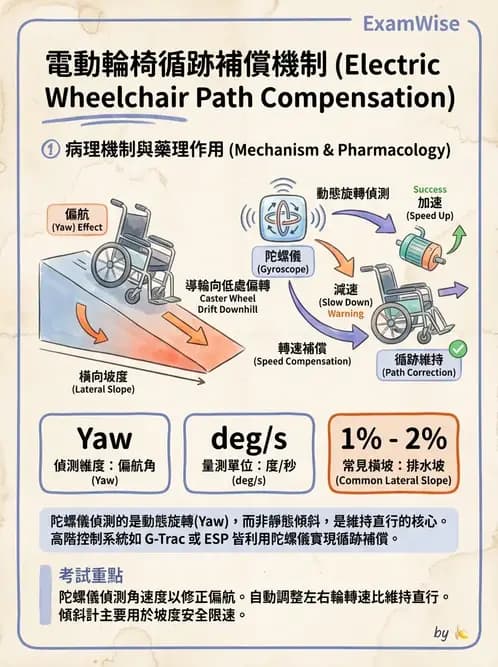
當電動輪椅沿著人行道或道路邊緣向前直線行駛時,導輪( caster )會受到鋪面傾斜(為了排水的設計)的影響而偏轉向下坡的方向,電動輪椅將因此偏離原本的直線行進方向。下列何者可自動偵測上述這些偏向問題,並自動調整二個驅動的輪轉速比例以維持穩定的直線行駛?
A加速規( accelerator )
B傾斜計( inclinometer )
C陀螺儀( gyroscope )
D差速器( differentiator )
詳細解析
本題觀念:
本題考查的是電動輪椅的控制系統技術,特別是如何利用感測器來維持行駛方向的穩定性(Directional Stability / Tracking)。 當輪椅在有**橫向坡度(Cross slope)**的路面(如排水設計的人行道)行駛時,因重力影響,前方的導輪(Caster)會自然向低處偏轉,導致輪椅車頭被帶往斜坡下方(Downhill turning tendency)。為了讓使用者不必持續手動修正方向,高階電動輪椅控制器會搭載特定的感測器來自動偵測並修正這種路徑偏離。
選項分析:
-
A. 加速規(Accelerometer):
- 主要功能是測量線加速度或重力加速度(可推算靜態傾斜角)。
- 雖然可以偵測到輪椅是否處於斜坡上,但它無法直接且即時地精準區分「車體的主動轉向」與「受外力影響的偏航(Yaw)」,對於動態修正行駛直線路徑的效果不如陀螺儀直接。
-
B. 傾斜計(Inclinometer):
- 主要用於測量物體相對於水平面的傾斜角度(Pitch 或 Roll)。
- 在電動輪椅中,傾斜計主要用於安全機制(例如:當坡度過陡時限制速度或禁止座椅升降),而非用於即時修正左右偏向的直線行駛問題。它只能告訴電腦「現在有斜坡」,但無法偵測「車子正在偏離直線」。
...(解析預覽)...
升級 VIP 解鎖圖文解析