114年:放射診斷(2)
下列何者最適合用於影像中「點」(isolated points)的偵測?
A圖 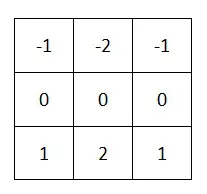
B圖 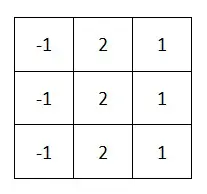
C圖 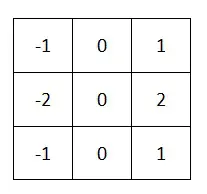
D圖 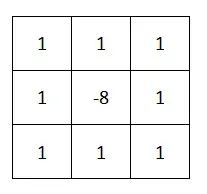
詳細解析
本題觀念:
本題測驗數位影像處理(Digital Image Processing)中「影像分割(Image Segmentation)」與「不連續性偵測(Discontinuity Detection)」的空間濾波器(Spatial Filters)概念。影像中灰階值的局部劇烈變化通常可分為點(Points)、線(Lines)與邊緣(Edges),不同的空間濾波器(遮罩,Mask)對應不同的幾何特徵偵測。
影像分析:
題目提供了四個 3×3 的卷積遮罩(Convolution masks),用於與原始影像進行空間濾波運算:
- 選項 A 圖片: 這是一個典型的一階導數算子,為 Sobel 濾波器(Sobel filter),用於計算垂直方向(y軸)的梯度,主要用來偵測影像中的水平邊緣(Horizontal edges)。
- 選項 B 圖片: 這個遮罩在垂直方向上的權重相同,具備明顯的方向性。雖然傳統垂直線偵測(Vertical line detection)的遮罩通常為 以確保總和為零,此圖片第三行的數值為 1,但其仍屬於特定方向的濾波器,無法對單一孤立點產生全方位的均勻響應。
- 選項 C 圖片: 這是另一個方向的 Sobel 濾波器,用於計算水平方向(x軸)的梯度,主要用來偵測影像中的垂直邊緣(Vertical edges)。
- 選項 D 圖片: 這是一個二階導數算子,即 拉普拉斯算子(Laplacian operator)。其特徵是中心像素權重(-8)極大,且周圍相鄰的 8 個像素權重(+1)與其符號相反,整體遮罩的數值總和為零。
選項分析
- (A):Sobel 水平邊緣偵測遮罩。基於一階導數,對影像的區域邊界(梯度的變化)有反應,無法有效突顯單一孤立點,不適合孤立點偵測。
- (B):具特定方向性的濾波器。孤立點在各個方向上都具有不連續性,因此偵測孤立點需要等向性(Isotropic)的遮罩,此具方向性的遮罩不適用。
- (C):Sobel 垂直邊緣偵測遮罩。同選項 A,為一階梯度的邊緣偵測,不適合孤立點偵測。
- (D):Laplacian 遮罩。由於其屬於二階空間導數且具備等向性(沒有特定的方向偏好),對影像中灰階值與周圍背景差異極大的單一像素(孤立點)極度敏感。當遮罩中心對準孤立點時,會產生極大的絕對值響應,是標準的孤立點偵測工具。
答案解析
在數位影像處理中,若要偵測影像中的「孤立點(Isolated points)」,最合適的數學工具是使用二階導數(Second-order derivative),其中最著名的就是 Laplacian 算子。
Laplacian 遮罩的設計原理在於測量一個像素與其周圍相鄰像素的灰階值差異程度。選項 D 的遮罩矩陣中,周圍 8 個方向的係數皆為 1,中心為 -8(確保在灰階值平坦或均勻的區域,卷積結果為 0)。 當此遮罩掃過影像時:
- 若區域灰階平坦,響應值為 0。
- 若遇到線條或邊緣,響應值中等。
- 若遮罩中心恰好落在一個與周圍對比極大的孤立點(例如:周圍全黑,中心一點白),其算出的絕對值響應會達到最大。 因此,設定適當的閾值(Threshold)後,即可輕易將該孤立點萃取出來。相對地,選項 A 與 C 的 Sobel 算子主要用於邊緣偵測(Edge detection)。故最適合用於孤立點偵測的是選項 D。
核心知識點
醫事放射師在醫學影像處理(如電腦斷層、磁振造影的影像銳化或雜訊處理)中,應熟記以下空間濾波器的對應特徵:
- 點偵測 (Point Detection):使用等向性的二階導數算子,代表為 Laplacian Mask,常見型態如:中心為 8 或 -8,周圍為 -1 或 1(如選項 D)。
- 邊緣偵測 (Edge Detection):使用一階導數算子(Gradient),用以尋找灰階漸變區的極值。代表為 Sobel Mask(選項 A、C)、Prewitt Mask、Roberts Mask,具有水平與垂直的方向性。
- 線偵測 (Line Detection):使用二階導數的變體,但遮罩設計上會強化特定方向(如水平、垂直、+45度、-45度)的權重。
參考資料
- Module 2.2 : Isolated Point Detection | Image Segmentation | Digital Image Processing (2025-05-04). https://vertexaisearch.cloud.google.com/grounding-api-redirect/AUZIYQFPuVJ8Z11tElhdcuClp72CkWcvzr9iBpLQpPejQCCUFnbhH2gGr_UUQrUeDkM86LR0bImQ3R6mJ8LFPtjCEvNJBxoP5Rv-883V6ryOP2uzHngrqNHirWrIND2mRx1CekAIwnKo0Kc=
- dH #025 Image Segmentation Fundamentals: From Point Detection to Advanced Edge Linking - Master Data Science (2025-12-02). https://vertexaisearch.cloud.google.com/grounding-api-redirect/AUZIYQHHufEZoMSdUQvloPfyasNYAZuMRRNdcQxdEaR_ZlgYhtjCVGtMnXnWbi-fvMWrvjXQb5oH1zg42_huxFO-Xq_tSxV2wv5yAcRBzge8eX7SYduGCC8kMe0sLKqwunFcR_yzf4OkRh3FWXhhIDO7Mb3S4klB7UoI2ZsEhQy3j4BROn8MxhoEN_PFqV-ZDB-vRiRd9BezCYtpBlCvBxVS3cWovUAqAohG
- Digital Image Processing 15CS753 - csenotes. https://vertexaisearch.cloud.google.com/grounding-api-redirect/AUZIYQGMLInTgzezxFpLho4drBYNfDJ-BiwI1PCUujtNRSsbv6uZK7AkVMpspJQ63Tel65k7atxccTG6aalzOfBjkYO2AXqx6ao12Q-V7ZKyEMF61g12ZTdcd8p4LW5dd7wdYhXuPw==
- Edge detection Image segmentation. https://vertexaisearch.cloud.google.com/grounding-api-redirect/AUZIYQFVFSeGd6N0VpIQZayUj9BsRos6K6t5lXUXbOL0qg8T_AbXRh3o7gPEAjQje2HM9DesXI-NnKe3IJPj2gr0Sl_KfjJPNeFaDCWRUaLiOQqJI56CSH6ZydyVMM20kY5QgvxagbjtqaGE6OlmEkdg5LERnx0YfxH3j1JQBeL7srqJMw6vayThNOa6b1w4MV2IPA==