114年:神經物治(1)
下肢布朗斯壯第一期的中風個案,以懸吊式外骨骼機器人進行走路訓練所依據的理論基礎,下列何者較不適當?
A利用健側承重時產生的反射擴散(irradiation),以誘發患側伸肌張力
B利用腰椎兩側伸肌間的交互抑制,以誘發患側屈曲動作
C誘發個案面對任務需求時,能使用患側殘餘動作功能
D刺激個案患側動作皮質塑性(plasticity),而重新控制患側肢體
詳細解析
本題觀念:
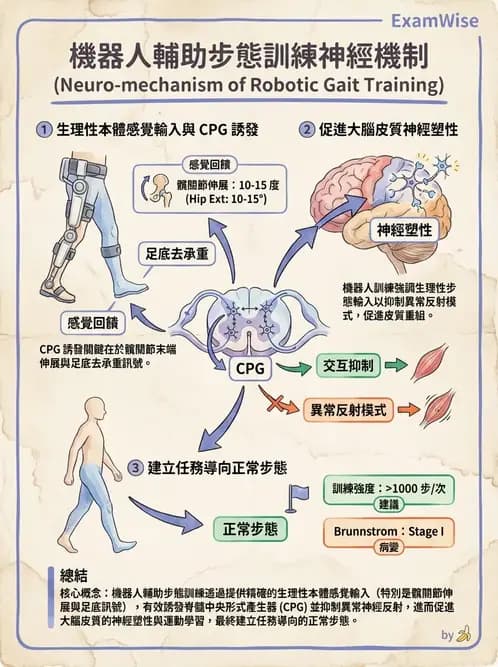
本題考查的是中風後步態訓練(Gait Training)的理論基礎,特別是針對布朗斯壯第一期(Brunnstrom Stage I)(即患側處於弛緩狀態,無隨意動作)的個案,結合**懸吊式外骨骼機器人(Suspension Exoskeleton Robot, 如 Lokomat)**進行訓練時的神經生理機制與治療原則。
選項分析
- (A) 利用健側承重時產生的反射擴散(irradiation),以誘發患側伸肌張力(較不適當)
- 步態週期機制:在正常步態中,雙腳是交替動作的。當健側處於站立期(Stance Phase)並承重時,患側應處於擺盪期(Swing Phase),此時患側下肢需要的是**屈曲(Flexion)**動作以完成跨步,而非伸直。
- 反射模式衝突:若利用健側承重(伸肌活動)透過反射擴散(Irradiation)來誘發患側的伸肌張力(類似 Crossed Extension Reflex 的概念),將會導致患側下肢伸直、僵硬,這會阻礙患側進入擺盪期,使患者無法完成跨步動作。
- 機器人訓練原則:外骨骼機器人訓練的核心在於提供「正確的生理步態輸入」(Physiological Gait Pattern
...(解析預覽)...
升級 VIP 解鎖圖文解析